Cooperative Perception for Self-Driving Cars
Cooperative Perception for a 2-vehicle system via Multi-Target Tracking

Cooperative Perception for a 2-vehicle system via Multi-Target Tracking
Autonomous drone development for the International Aerial Robotics Competition (IARC), Mission 7
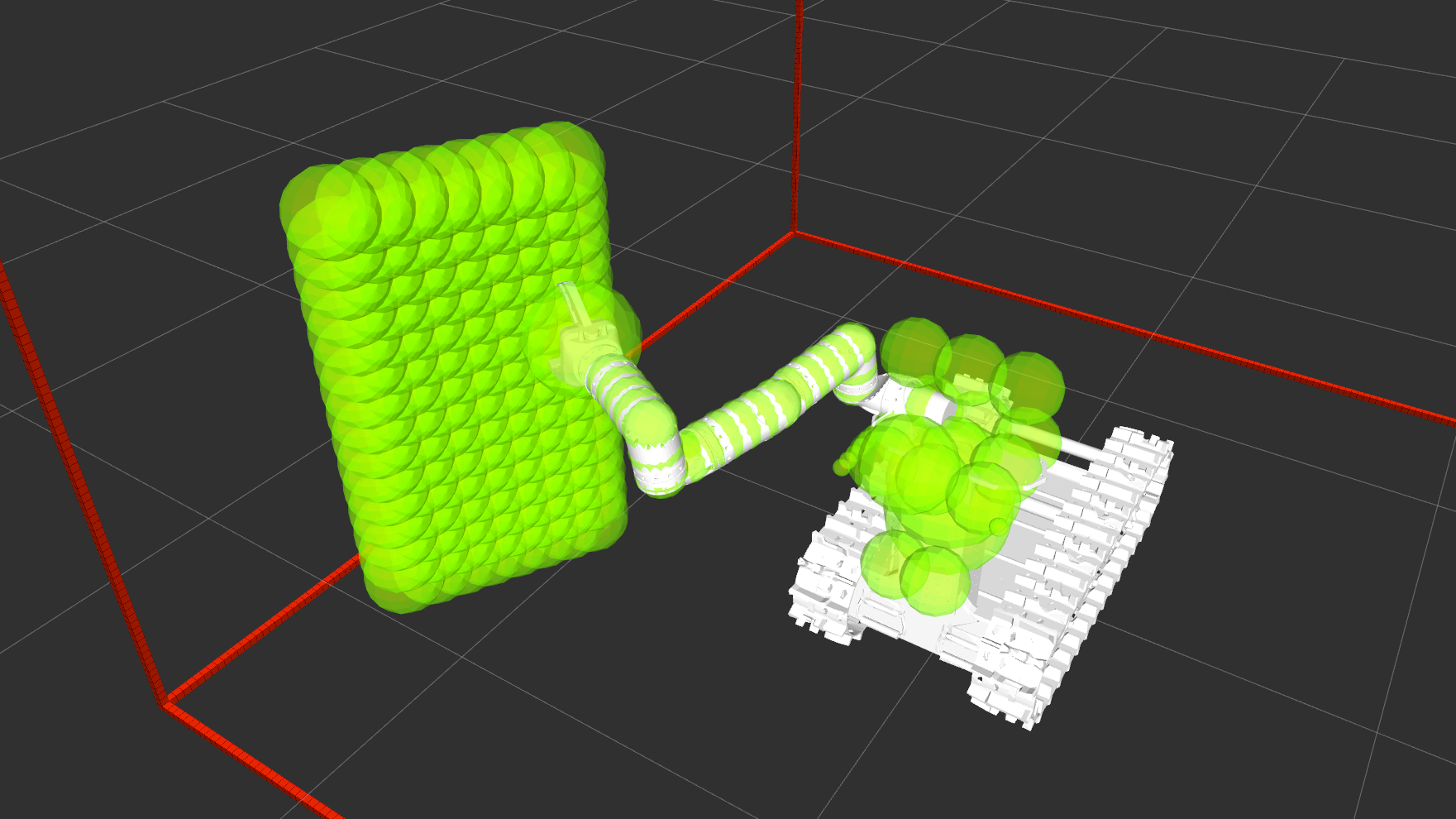
A simple planner to open doors with a mobile manipulator
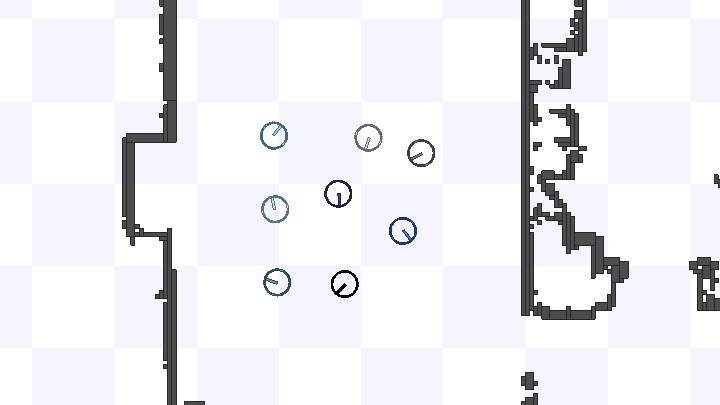
Reciprocal collision avoidance for a swarm of turtlebots
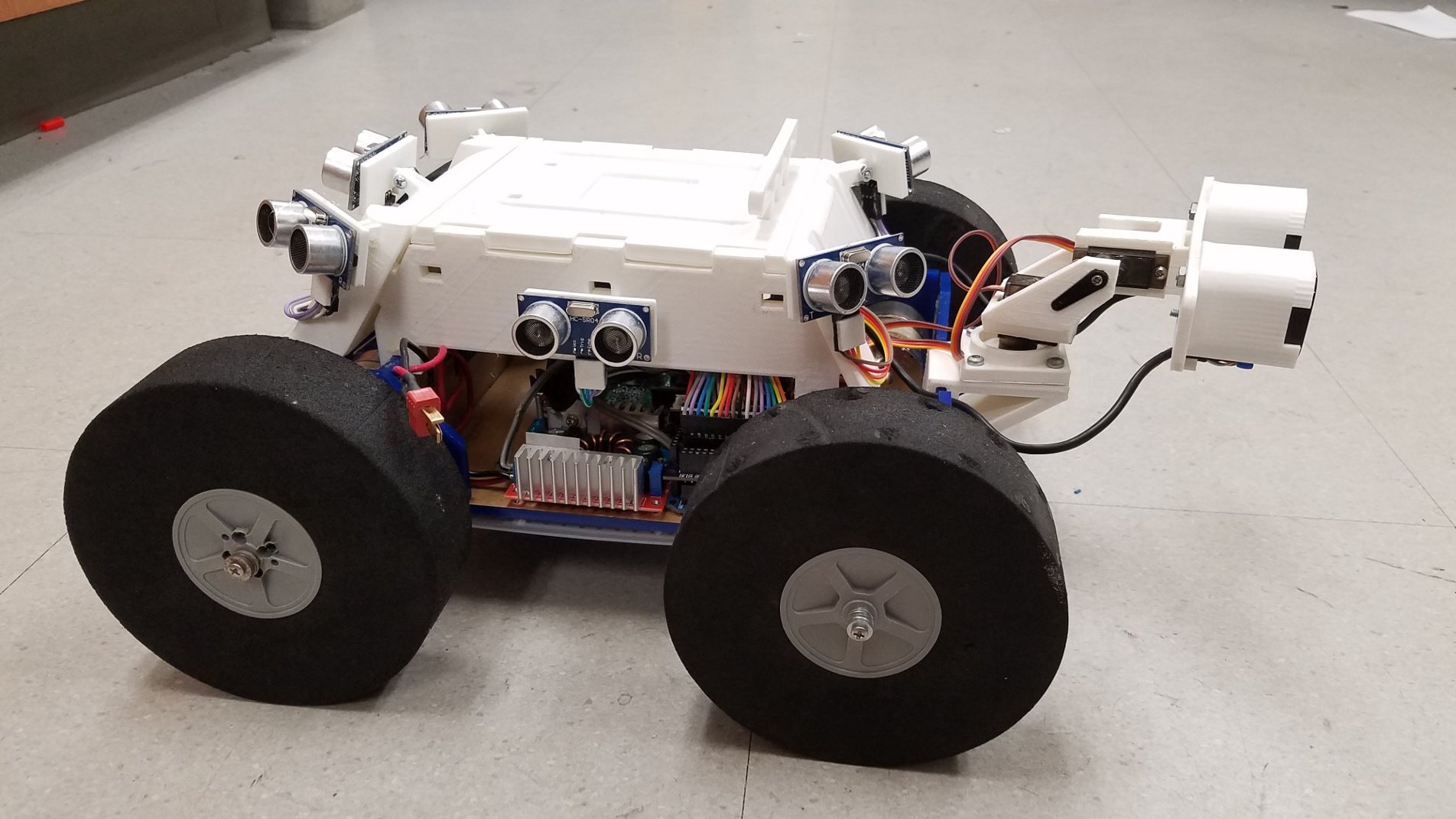
A little rover with cameras on a makeshift 2-axis gimbal, controllable over the web
A tiny, speedy maze-solving robot
A high-speed line following robot