Rover
Over the 2015-16 school year, I co-led a team in Pitt’s RAS club (with Levi Burner) to build this wifi-enabled rover. The brain was an Arduino Mega and a Raspberry Pi, the cameras could be streamed out to a web client, where you could view the streams and control the gimbal with Google Cardboard.
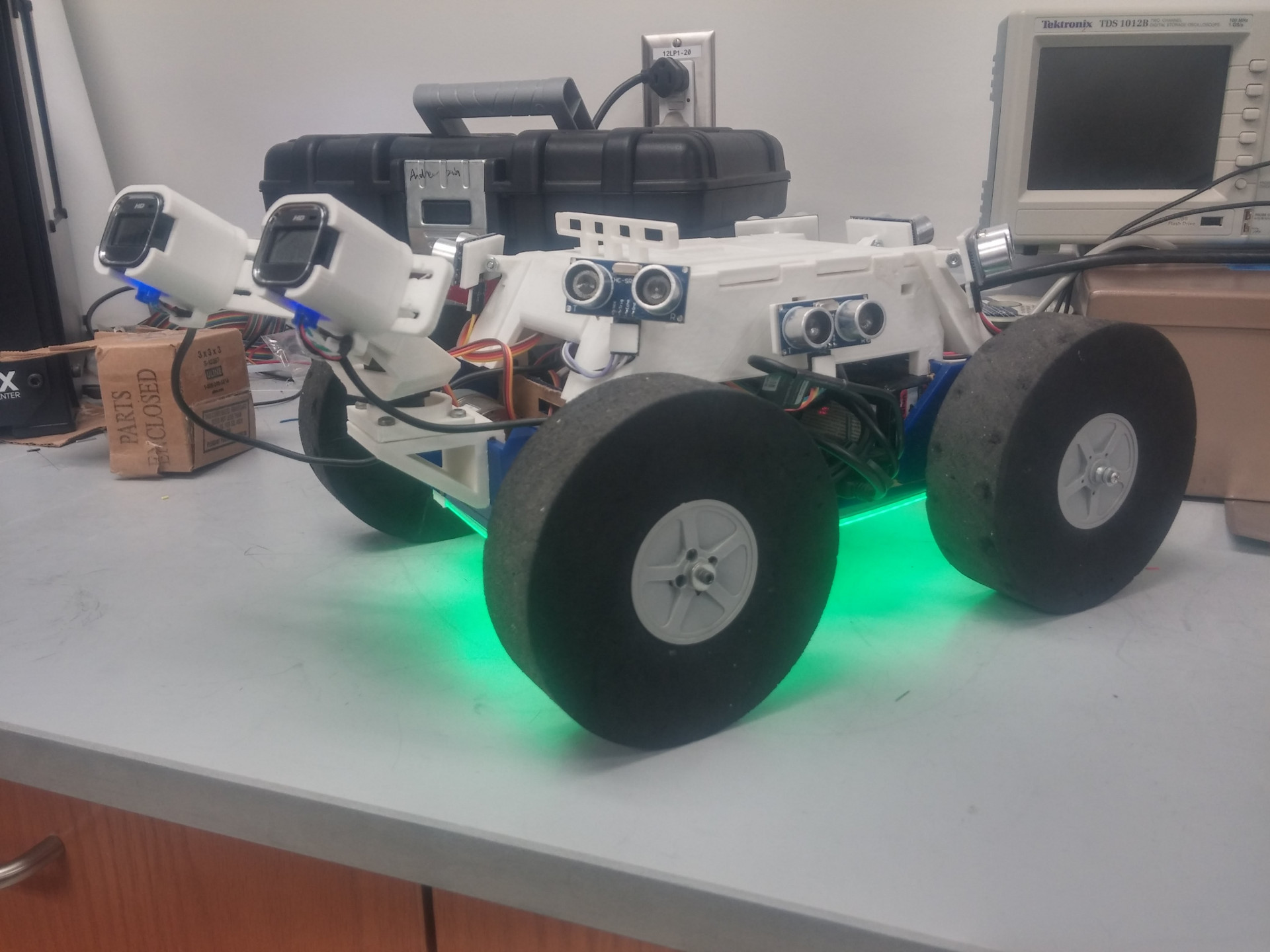
You could control the addressable RGB strips on the bottom too (this gif is from an early test though).